Towards a Subcognitive Architecture
Outlining Information Flows and Modules

We are now at the point where we can attempt to catalogue the components and information flows of a basic subcognitive architecture. At the outset, I suggested that a cognitive architecture should have five main components:
Perception: To extract the relevant state of the current environment;
Motivation: To prioritize the satisfaction of the organism's needs;
Behavior: To satisfy the organism's needs through direct action;
Cognition: To plan so that direct actions are available to satisfy needs; and
Memory: To track the history of the environment in detail to enable planning.
The final two — cognition and memory — are the areas in which humans seem to far exceed other mammals in terms of capacity. These capabilities rely biologically on the uniquely human prefrontal cortex for cognition and potentially on an innovative human cooptation of the left hippocampal formation to subserve episodic memory (O’Keefe, 2003).
The basic mechanisms for perception, motivation, and behavior are mostly shared among all mammals, and these three clearly suffice to support autonomous agents. Their operation is largely unconscious, so I will use the term subcognition to refer to them in aggregate. Mammals, of course, do have elements of cognition and memory, some more and some less, so subcognition is only part of the mammalian heritage. But I have to start somewhere, and so in proposing a subcognitive architecture, I am trying to provide a basis from which we can begin to explore a cognitive architecture of conscious reasoning processes that sits on top of the subcognitive capabilities, regulating and manipulating them to serve conscious goals.
I will now outline some analysis of the design considerations for a subcognitive architecture. By architecture I mean a design for an overall system consisting of a recursive decomposition of the whole into functional components and a plan for how these components interact. The whole process is recursive, because once we have identified components, we must also design an architecture for the components.
There are multiple ways to build an architecture, including a top-down (deductive) process that first breaks up the whole and a bottom-up (inductive) process that considers the natural aggregation of low-level components. My colleague Jim Snyder recommends a third process he describes as middle-out, in which one starts with the interfaces and information flows as a handle for identifying components. If we have decomposed the whole in a reasonable way, then these interfaces should be elegant. And so we start by identifying the information flows within the subcognitive system.
Information Flows in Subcognition
The purpose of the brain is to mobilize the body to satisfy the needs of the organism. A complex organism has many needs, and different needs may drive conflicting behaviors. Thus the organism must prioritize these needs. The first key information flow is a prioritization of the needs of the organism. We will call this prioritization the motivational state and imagine it to be an association to each need of a single number, such that these numbers can be set in an order that reflects the current prioritization of needs and such that their ratios indicate the relative strength of each need. At a minimum, these needs include food, water, rest, safety, waste elimination, and reproduction.
These needs are satisfied by action in the world, which requires motor output, which is an information flow.
Next, we suppose that needs are satisfied by objects. Here I do not mean an object as having a definite shape or form, but rather narrowly as something out in the real world that satisfies needs. Thus water satisfies thirst, and a bed satisfies rest, making both water and bed objects in this sense, even though water is technically a substance, not an object. If needs are satisfied by objects, then an accounting of the available objects in the world becomes a key information flow. Likewise, the sensory input from which objects are recognized is also a flow.
To act on an object, not only must the object be perceived, but its position relative to the self must also be clear. Hence the egocentric spatial position of each available object is another critical information flow in that it indicates what actions are necessary to use the available objects to satisfy the current motivational state.
Simply knowing the position of an object is not enough to guide action; one must also avoid any obstacles. Potential obstacles constitute yet another information flow. Note that available objects can also be potential obstacles (such as a lake or river), but when viewed as obstacles, it is not only their suitability for needs that matters, but their shape in the world. Therefore, the organism so far has a reason to model the shape, location, and utility value of percepts, so that we might unify the information flows of available objects and potential obstacles to form a single information flow of objects with threefold purpose of representing shape, location, and utility.
Obstacles can be avoided by following an unobstructed trajectory, which can be determined as a function of the shape and location of potential obstacles. Once provided with an unobstructed trajectory, action does not require knowing all possible obstacles, but path planning does. Thus we can simplify action control by specifying a feasible trajectory as an important information flow.
The organism cannot pursue all available objects at once, and so it must choose to seek out a single object at a time. This single object will be called the selected object, and it must be chosen from among the available objects. The selected object is intended to satisfy a selected need, which establishes the goal of action with respect to the object. These selections must be made in accordance with how available the selected object is. An apple directly across the river may be less preferable than one that is on the same side of the river but further away. We could suppose that the feasible path is a critical ingredient when selecting a target, or else there might be a separate mechanism that estimates accessibility without forming feasible trajectories. We defer the question of how feasibility enters target selection for now.
So far, the identified information flows are sufficient for the case where there are available objects in the immediate vicinity to satisfy the current motivational state. But if there are no suitable available objects, then the organism must seek objects that satisfy its needs in another location. The problem of searching for objects is unbounded in scale; in order to limit the scope to subcognition, we will introduce two considerations.
For the first consideration, the utility value of objects will be expanded so that an object has utility for a need if upon approaching that object there is high likelihood of observing an available object satisfying that need. Thus objects can serve as indices (in the sense of Peirce) to point to other objects, and their utility is modeled to account for the objects that they point to. This consideration expands the number of available objects at the cost of potential failure; this potential failure must eventually become part of the object representation to enable more efficient target selection. By this logic, a tree can receive utility value for food, and the potential failure might be accounted for by distinguishing fruit trees from other trees.
As a second consideration, we introduce the concept of a territory much larger than the perceptual range of the organism. We limit the organism to a single territory, and presume that it will map the entire territory that it claims. This limit reflects the restriction to subcognition, as managing more than one territory would introduce place hierarchies and memory, both of which are heavily involved in cognition.
This territory produces more information flows. First, there is the allocentric position of the organism within the territory. Secondly, regions of the territory should be treated as a kind of available object to be considered when selecting targets; call these available regions. Thirdly, feasible routes must be found for moving from the current position to a selected region. Notice that these flows — allocentric position, available region, feasible route, and selected region — are analogous to the flows for available objects within the perceptual field, namely, egocentric location, available object, feasible trajectory, and selected object. We can therefore collapse these flows into the location, available targets, feasible path, and selected target.
The information flows above are sufficient to enable subcognition. To recap, they are:
Motivational state to prioritize needs;
Motor output to the various motor systems;
Sensory input from various senses;
Available targets, specifically
objects by shape, size, egocentric location, and proximal and distal utility for satisifying needs and
territorial regions by shape, position, extent, and capacity to satisfy needs;
Feasible paths including
trajectories to objects from an egocentric perspective and
routes to regions from an allocentric perspective;
Selections for current action including
selected target, either a region or object and
selected need intended for satisfaction as a goal; and
Location information comprised of
egocentric position of objects in perceptual reach and
allocentric position of self and targets within territory.
These information flows allow us to propose mechanisms for producing and consuming these flows, which will form the building blocks of subcognition.
Subcognitive Interfaces
The next step is to determine what abstractions and data structures can elegantly encapsulate these information flows. Two salient features we can readily observe above are (1) the importance of space and location for directing action and (2) the instability of the perceptual field for tracking objects. It would then make sense to create data structures that encapsulate space and buffer the ever changing results of perception.
Therefore, let us introduce two critical spatial data structures to serve as interfaces between the inevitable evanescence of perception and the necessity for object permanence to enable successful action. These are:
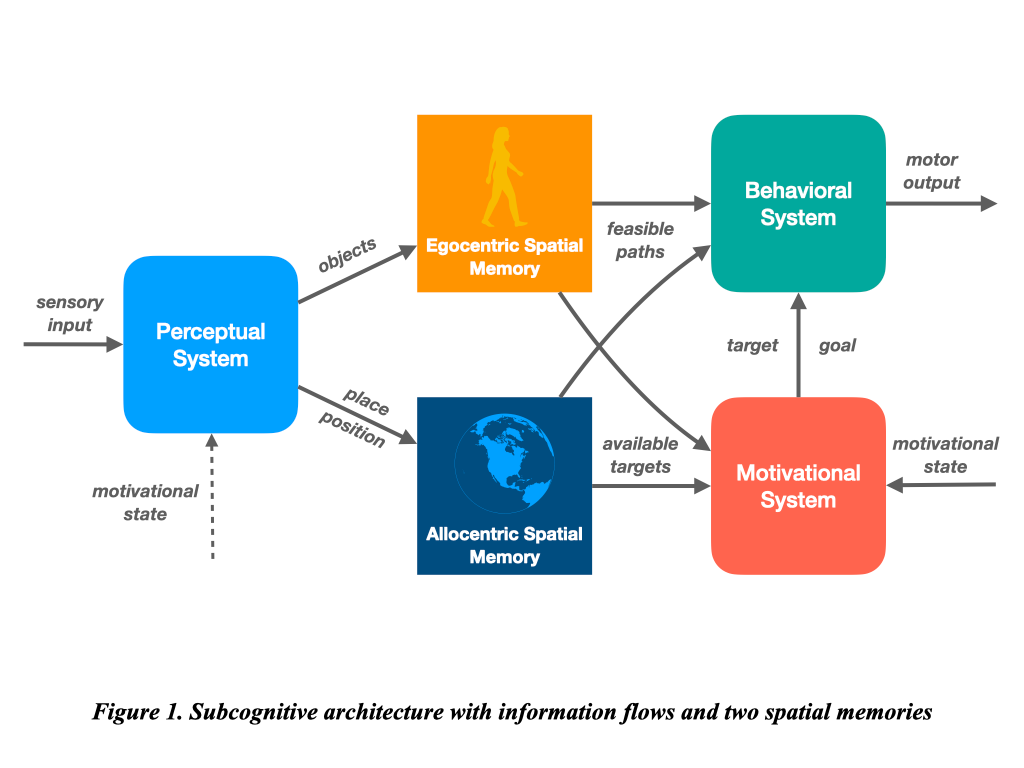
Egocentric spatial memory, which records the position of objects reported by the perceptual system relative to self perception and predicts their change over time. Fundamentally, this spatial memory predicts answers to the following hypothetical question: If I turn my attention to a particular region of nearby space, what will I observe? The overall scope of this system is the immediately perceivable area around the body, and no more.
Allocentric spatial memory, which records the position of the self with respect to external landmarks in the context of a single fixed territory. This memory retains shapes and boundaries that are relevant at a navigational scale and parses the territory into overlapping regions that are roughly scoped to egocentric perceptual capabilities.
These two spatial data structures intermediate between perception and behavior. Against this background, we can propose a tripartite decomposition of subcognition that uses these two data structures as a communication medium:
A perceptual system to filter sensory input and populate both spatial memories with objects, potentially conditioned on the motivational state;
A motivational system to select a target for action from among the contents of the spatial memories to satisfy some need based on the motivational state;
A behavioral system to take the selected target and need, generate a feasible path to satisfy the need, and produce motor output implementing this path.
The layout of this subcognitive architecture is shown in Figure 1 with the relevant information flows.
In the next few posts, we will perform the same kind of analysis for each subsystem of this subcognitive architecture, one at a time, clarifying the interfaces of the subsystems and spatial memory and integrating what has been covered in previous posts. Once a subcognitive architecture is in place, we can then consider cognition and language as facilities that operate on and manipulate this lower architecture.
I hope you find this line of investigation interesting and potentially useful. Please leave any comments and questions below!
If we're thinking about objects and obstacles as core elements, how might we think about the distance between them? Whether allocentric coordinates or egocentric vectors, there's still a unit of measure at work in perception, perhaps - and, if so, would that unit of measure itself be an object or an obstacle?
Very interesting the idea of middle-out architecture process. Somehow this inspires this thought: "if you give a man a fish he'll eat for a day, but if you teach a man to fish, he'll eat for a lifetime" ... if you teach a man to teach himself new skills, I'd like to think he'll eventually build a machine to solve for society's scarcity.